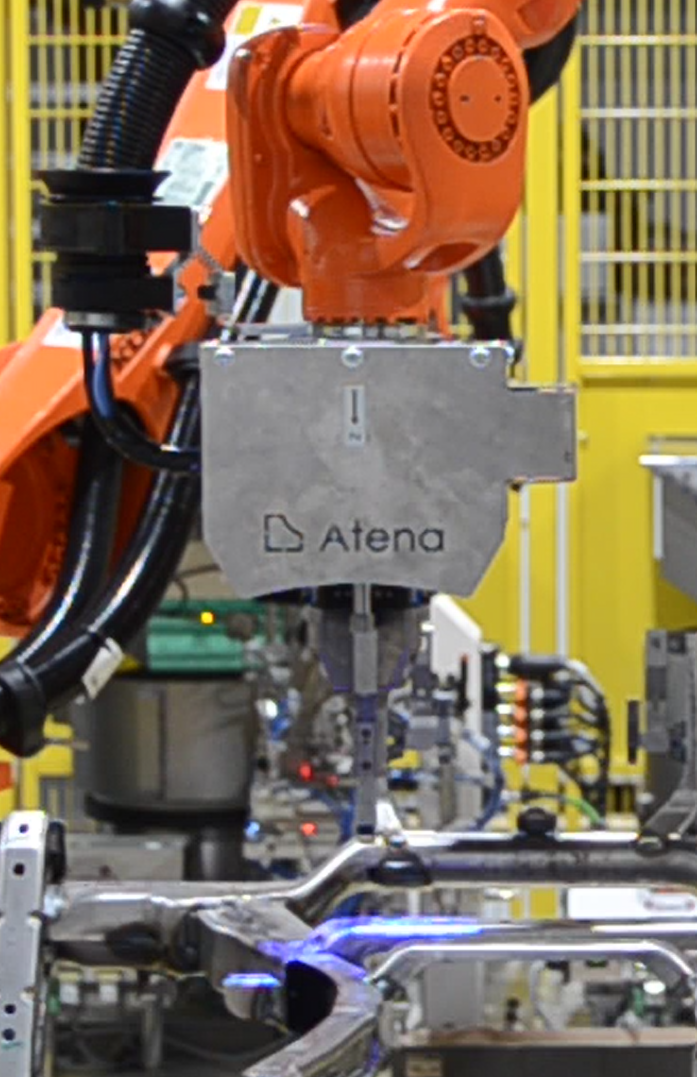
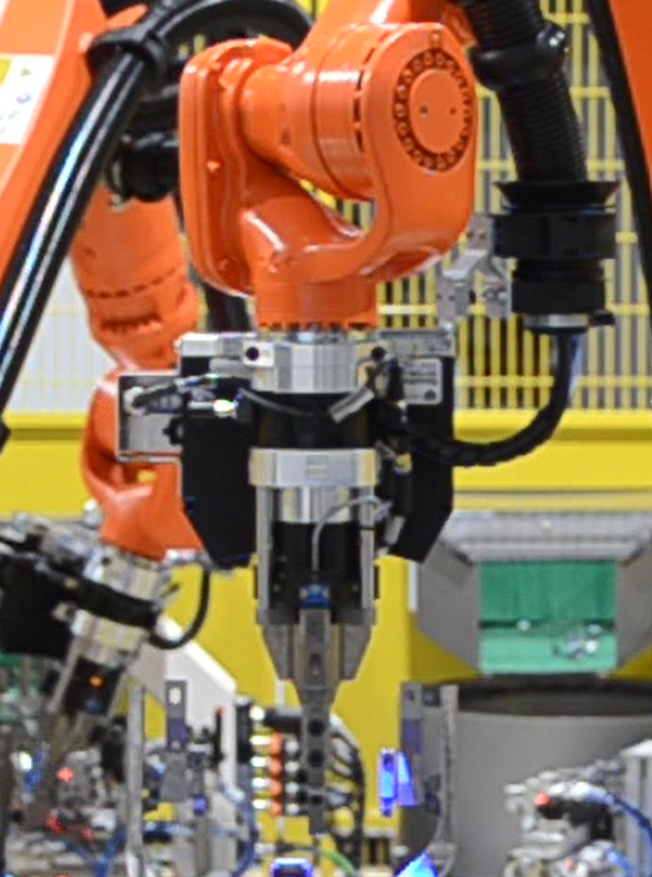
Este projeto surgiu perante a necessidade de automatizar o processo de fabrico, uma vez que este era manual e haviam muitos gastos associados a peças não conformes e também otimizar o tempo de ciclo.
Esta máquina tem como objetivo montar clips metálicos numa peça soldada. Como a peça após soldadura sofre empenos e desvios na posição de introdução dos clips houve necessidade de colocar um sistema de visão 3D para realizar robot guidance.